I’m a robotic researcher at Baidu Research in Sunnyvale, California. My research interests focus on robotic manipulation and robot learning.
I obtained my Ph.D. from UC Berkeley in Dec 2021, supervised by Prof. Masayoshi Tomizuka. Before joining Baidu, I had the opportunities to work at Google X/Intrinsic, MERL, FANUC.
EDUCATION
Ph.D. in Mechanical Engineering (2021.12)
University of California, Berkeley
M.S. in Mechanical Engineering (2018.5)
University of California, Berkeley
B.Sc. in Vehicle Engineering (2016.6)
Beijing Institute of Technology, Beijing, China
Research
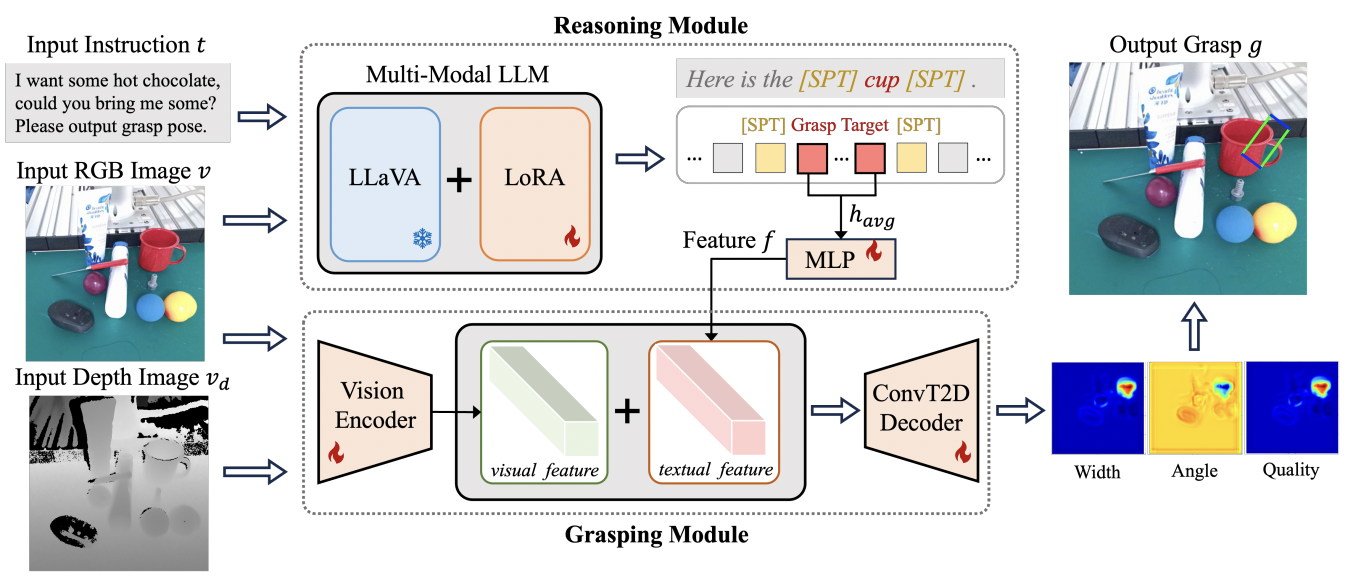
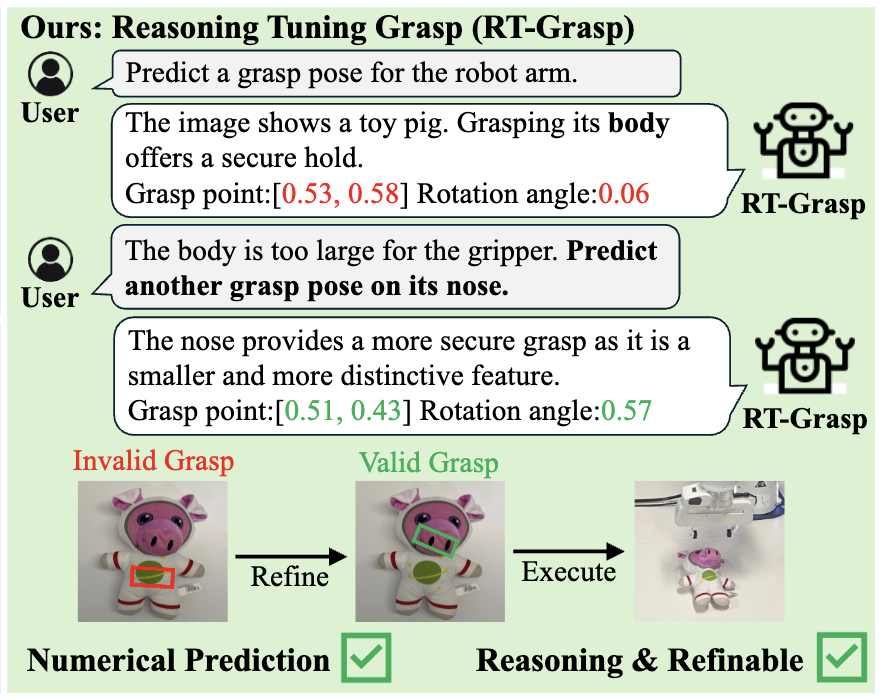
Reasoning Grasping via Multimodal Large Language Model
Shiyu Jin, Jinxuan Xu, Yutian Lei, Liangjun Zhang
Under review
[Paper]
Transformer-Based 3D Object Manipulation using Virtual In-Hand Views
Weiyao Wang, Yutian Lei, Shiyu Jin, Gregory D. Hager, Liangjun Zhang
Workshop in CoRL 2023
Under review
[Website]
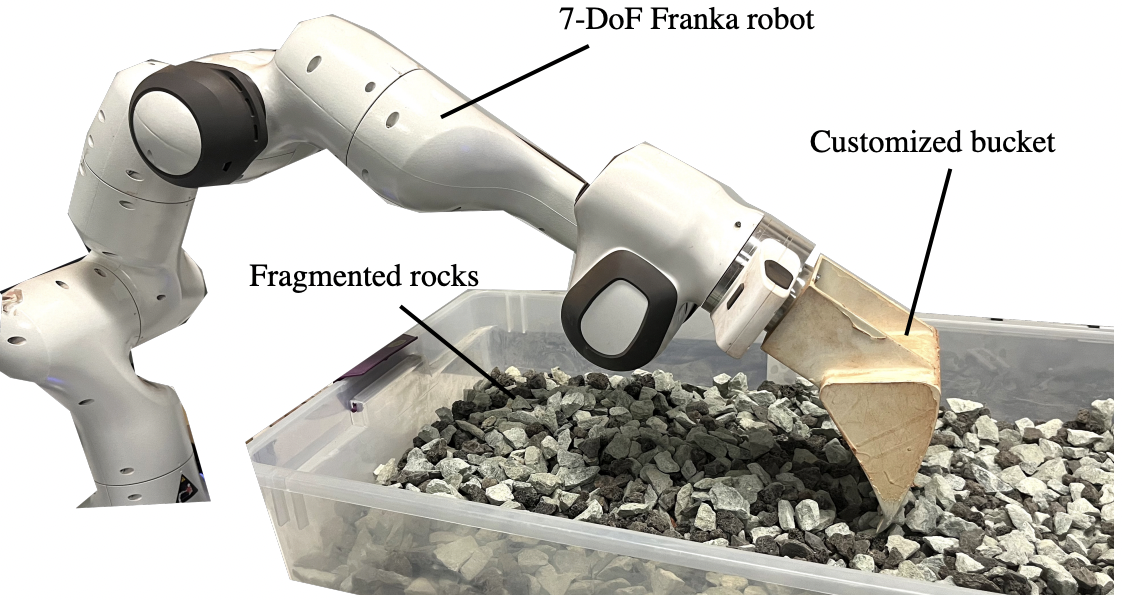
Robotic Excavation of Rigid Objects using Offline Reinforcement Learning
Shiyu Jin, Zhixian Ye, Liangjun Zhang
Under review
[Paper]
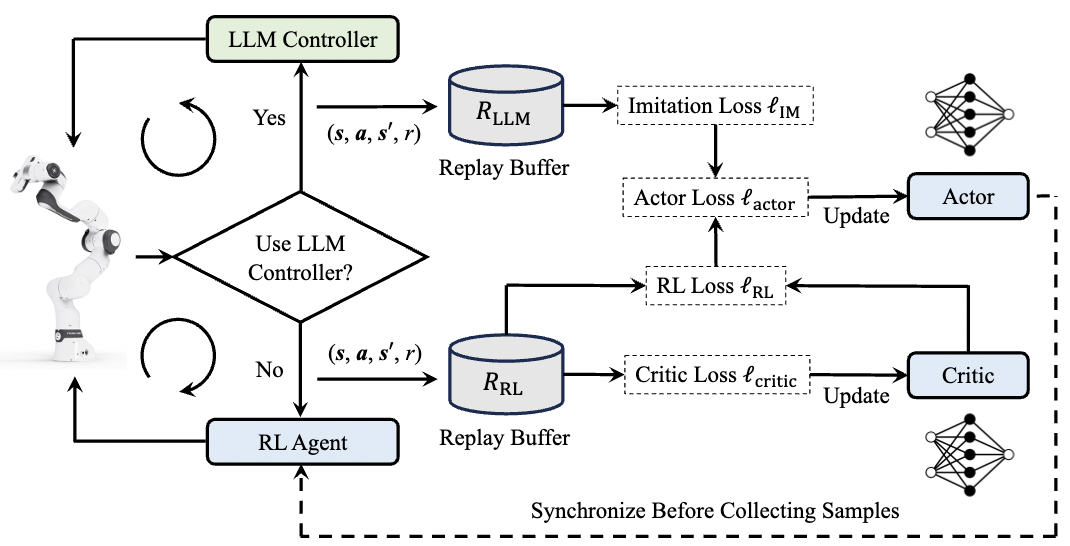
RLingua: Improving Reinforcement Learning Sample Efficiency in Robotic Manipulations with Large Language Models
Liangliang Chen, Yutian Lei, Shiyu Jin, Ying Zhang, Liangjun Zhang
IEEE Robotics and Automation Letters (RA-L) 2024 (Accepted)
[Website]
Autonomous Wheel Loader Simulation
Shiyu Jin

Trajectory Optimization for Manipulation of Deformable Objects: Assembly of Belt Drive Units
Shiyu Jin, Diego Romeres, Arvind Ragunathan, Devesh K. Jha, Masayoshi Tomizuka
ICRA 2021
[Paper]
Contact pose identification for peg-in-hole assembly under uncertainties
Shiyu Jin, Xinghao Zhu, Changhao Wang, Masayoshi Tomizuka
American Control Conference (ACC) 2021
[Paper]